



|
市場調查報告書
商品編碼
1348748
智慧型汽車的E/E架構(2023)Intelligent Vehicle E/E Architecture Research Report, 2023 |
|||||||
本報告針對智慧汽車E/E架構進行研究分析,提供國內外汽車廠商E/E架構演進趨勢、關鍵技術等資訊。
目錄
第 1 章 OEM E/E 架構更新概述
- 汽車歐洲經濟區的演變
- 汽車 EEA 的演進:從分散到集中
- 汽車歐洲經濟區的演變:汽車價值鏈的重組
- 汽車歐洲經濟區的演變:四個維度
- 未來 10 年汽車 EEA 的演變
- 建構下一代歐洲經濟區的重要技術
- 建構下一代歐洲經濟區的核心要素與功能(1)
- 建構下一代歐洲經濟區的核心要素與功能(2)
- 下一代區域歐洲經濟區的三個演變階段
- 下一代歐洲經濟區發展的挑戰
- 汽車 EEA 標準化流程
- OEM EEA 更新概述
第二章 新興汽車製造商的E/E架構
- Tesla
- Xpeng
- NIO
- Li Auto
- NETA Auto
- Leap Motor
- Voyah
- Human Horizons
- ZEEKR
- IM Motors
- ARCFOX
第三章 自主品牌E/E架構
- Geely
- Great Wall Motor
- GAC
- BYD
- SAIC
- Changan
- FAW Hongqi
- Chery
第四章 國外品牌E/E架構
- Volkswagen
- BMW
- Mercedes-Benz
- Toyota
- General Motors
- Ford
- Volvo
- Renault-Nissan-Mitsubishi Alliance (RNM)
- Stellantis
第五章 汽車E/E架構更新下的供應鏈發展
- 跨域/中央運算平台:供應鏈部署
- 跨域/中心計算SOC:供應鏈部署
- MCU:供應鏈開發
- 汽車公車網絡:供應鏈發展
E/E Architecture Research: How will the zonal EEA evolve and materialize from the perspective of supply chain deployment?
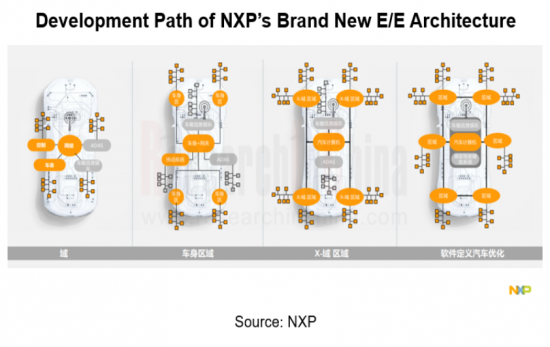
Through the lens of development trends, automotive EEA (Electronic/electrical Architecture) will eventually evolve to central computing architectures with functional logics centralized in one central controller. OEMs become ever more radical in EEA planning. For OEMs, the year of 2023- 2023 will be a key time node to mass-produce the next-generation "quasi-central computing + zone" architecture.

The "quasi-central computing + zone" architecture can be further subdivided into many types:
- Body-zonal architecture: The controller of the body zone is connected to the central computing unit through the high-speed Ethernet backbone network, and the central computing unit integrates the functions like vehicle control, body control and gateways, simplifying the network topology, wiring harness layout and weight;
- X-domain zonal architecture: The functional zone is combined with the body zone, and the X-domain uses a more powerful processor unit, which can independently call the sensors in the zone and process data;
- Software-defined vehicle (SDV) optimized architecture: With centralized and service-oriented computing, the central computer of vehicle has powerful processing capability and makes all decisions, while zonal controllers supply power and perform the instructions issued by the central control unit.
Under the zonal architecture, MCUs tend to feature high performance and multi-core
In the future central integrated E/E architecture, the central processing unit communicates with zonal controllers through Ethernet, while zonal controllers communicate with sub-ECUs, sensors and actuators through CAN/LIN bus.
Physically, the zonal controllers logically concentrate multiple ECUs, proposing a higher requirement for the computing power of MCU in the zonal controllers. In the traditional ECUs with simple functions, a single-core MCUs with low performance are qualified, while zonal controllers often require multi-core MCUs. In a multi-core MCU, each core can run a single function, while multi-core can realize multiple functions, thus realizing the integration of multiple ECU functions.
X-Soul Architecture of GAC Aion GA3.0
The newly-launched Hyper GT is the world's first model that uses NXP S32G3 as the central computing unit processor. The "central computing unit" developed by Continental adopts the latest "NXP S32G399 high-performance gateway computing chip". The basic middle layer of the software architecture of the front and rear zonal controllers adopts atomic service packaging and standardized interfaces, and the middle layer uses enhanced composite services and can be implemented independently.
Xpeng's X-EEA3.0:
For the first time in China, it has attained a communication architecture with Gigabit Ethernet as the backbone and supports multiple communication protocols, making vehicle data transmission faster. The central computing unit and zonal controllers of X-EEA3.0 adopt Renesas' flagship MCU based on the third-generation RXv3 CPU core. On the basis of X-EEA3.0, Xpeng G6 has further mass-produced and deployed the new Fuyao X-EEA3.5.

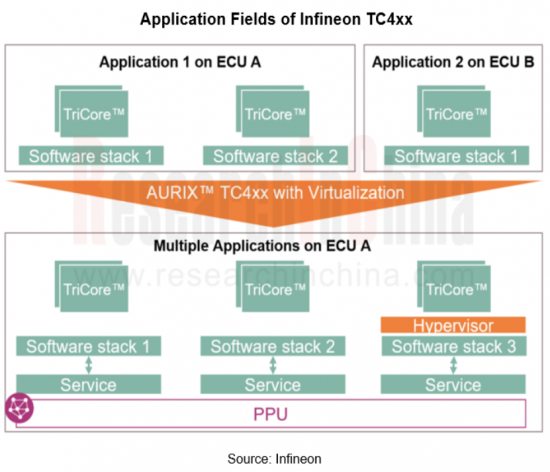
Infineon's 3rd-generation AURIX™ TC4xx MCU:
High-performance AURIX™ TC4xx family mainly meets the new requirements of the central computing and zonal control. It is equipped with up to six TriCore™ 1.8 embedded cores, each with a clock frequency of up to 500MHz; integrated with a PPU coprocessor, it can realize fast vector operation, basic neural network algorithms and other complex mathematical algorithms. In future regional controllers, PPU can be used in some information security algorithms for modeling, model predictive control, and anti-intrusion detection.
Under zonal architecture, the demand for automotive Ethernet PHY and switch chips soars, so that the price fluctuates sharply.
The interface circuit of automotive Ethernet is mainly composed of MAC controllers and PHY chips. In terms of integration method, embedded chip vendors generally integrate the MAC inside the MCU/CPU. For example, Infineon's AURIX integrates MAC into the main MCU, and also integrates CRE/DRE, the dedicated hardware communication routing module; whereas, the PHY chip is provided by the OEM or controller supplier as an independent chip.
The global Ethernet switch/PHY chip market size hit about USD800 million in 2023, and it is expected to reach USD2.5 billion in 2028. It is estimated that each car will use 2-4 Ethernet switch chips and 2-4 PHY chips on average by 2028.
Since 2023, the short-term price of some Ethernet PHY and switch chips of Broadcom BCM89 family has soared several times, with a single chip valued USD30-40. The BCM8955X family is Broadcom's third-generation automotive Ethernet switch solutions, which are mainly used in ADAS, infotainment systems and gateways. At present, Broadcom mainly promotes the BCM8957X family, which is the only automotive Ethernet switch in the world that supports the 802.3ch standard.
In a typical central computing + zonal architecture, each zonal gateway contains an Ethernet switch, and each vehicle requires at least 6-7 Ethernet switch chips. At present, Marvell, Broadcom, NXP and other automotive network communication chip vendors have proposed the next-generation network architecture.
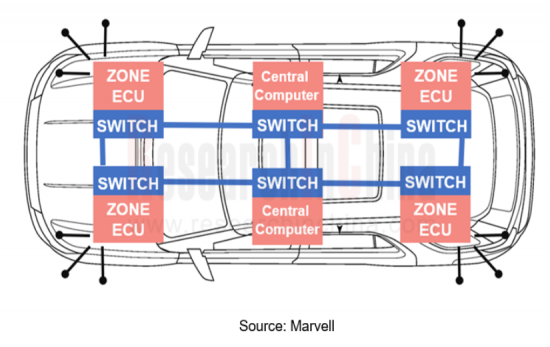
OEMs forecast that the central computing + zonal architecture will only come true in 2025 by virtue of 10G bandwidth. In June 2023, Marvell announced the Brightlane Q622x family of central Automotive Ethernet switches to support the zonal networking architectures of next-generation vehicles. Central Automotive Ethernet switches are high-bandwidth, high-performance devices optimized to coordinate data traffic between zonal switches, which aggregate traffic from devices located within a physical zone of a car like processors, sensors, actuators, storage systems and others.

In the zonal architecture, the on-chip high-speed communication of the central computer requires PCIe switches.
Driven by Chat GPT, the demand for AI servers has skyrocketed, and PCIe Switch chips represented by Broadcom SS26 are in shortage with the price swelling. In the next-generation E/E architecture, expensive PCIe switches are required by connection between multi-SoC cascade, SSD storage based on PCIe and the central SoC.

The cross-domain communication of automobiles will be based on PCIe, which can improve the communication efficiency to dozens of gigabytes compared with the previous Ethernet, and PCIe Switch enables the on-chip communication. Ethernet Switches are mounted on different SoCs in the central computing unit. The external sensors are connected in series through the Ethernet switches of zonal ECUs.
- Qualcomm's first-generation autonomous driving system, Ride3.0, uses PCIe switches in the automotive industry for the first time, that is, Microchip's PM43028B1-F3EI priced at about $100 dollars, higher than that of SA8155P and almost 4-5 times that of Ethernet switches.
- Visteon's dual Qualcomm 8155 cockpit domain controllers are internally connected via the PCIe bus. Two 8155 SoCs are connected through PCle bus, with the transmission rate of 16Gbps, which can efficiently transmit the real-time video input of ADAS.
- SiEngine Technology has customized the high-speed interconnection bus SE-LINK for ECARX to realize the simultaneous operation of two "Longying No.1" chips. Two Antora 1000 platforms are connected to get Antora 1000 Pro. It can provide double computing power while maintaining the transmission speed, wherein the transmission speed of PCIe 3.0 Lane reaches 7.28 GT/s.
The evolution of the E/E architecture drives the upheaval of the underlying OS of the vehicle.
Adaptive AUTOSAR introduces the service-oriented architecture (SOA) and support for POSIX system, suitable for high-computing SoCs. SOA or the service-based middleware platform is also known as the automotive OS.
- The SOA of GAC's X-Soul architecture has realized standardized layered interfaces, software modularization, function atomization, remote function configuration and so on through the layered decoupled basic software architecture platform. GAC's X-Soul architecture is China's first product developed based on the ASF (AUTOSEMO Service Framework) technical specification. On the basis of the SOA, the GAC Rubik's Cube scenario co-creation platform has been mass-produced with GAC Aion Hyper GT.
- In April 2023, Huawei released the iDVP intelligent digital base, which is a SOA that allows zonal access and central computing. iDVP includes a hardware platform and a software platform. The hardware platform refers to the basic hardware platform of the computing and communication architecture, and the software platform includes an operating system, a basic management framework and a SOA software framework. In order to facilitate users to develop software on iDVP, Huawei has developed a supporting tool chain.
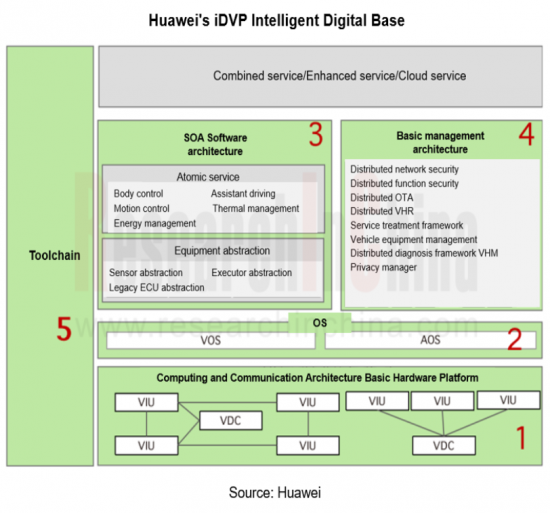
Table of Contents
1 Summary of E/E Architecture Updates of OEMS
- 1.1 Evolution of Automotive EEA
- 1.1.1 Evolution of Automotive EEA: from Distributed to Centralized
- 1.1.2 Evolution of Automotive EEA: Automotive Value Chain Reconstruction
- 1.1.3 Evolution of Automotive EEA: Four Dimensions
- 1.1.4 Evolution of Automotive EEA in the Next Decade
- 1.1.5 Key Technologies for Building Next-generation EEA
- 1.1.6 Core Elements and Features for Building Next-generation EEA (1)
- 1.1.7 Core Elements and Features for Building Next-generation EEA (2)
- 1.1.8 Three Evolution Phases of Next Generation Zonal EEA
- 1.1.9 Challenges in Evolution of Next Generation Zonal EEA
- 1.2 Automotive EEA Standardization Process
- 1.2.1 Automotive EEA Standards: Standardization Requirements Framework
- 1.2.2 Automotive EEA Standards: ISO 26262 & GB/T 34590 Related Standards
- 1.2.3 Automotive EEA Standards: Automotive EEA Working Group Established
- 1.2.4 Automotive EEA Standards: Problems to be Solved by Automotive EEA WG
- 1.2.5 Automotive EEA Standard: Intelligent Connected Vehicle EEA Industry Technology Roadmap (1)
- 1.2.6 Automotive EEA Standard: Intelligent Connected Vehicle EEA Industry Technology Roadmap (2)
- 1.2.7 Automotive EEA Standards: Data Distribution Service (DDS) Test Methods
- 1.2.8 Automotive EEA Standards: Data Distribution Service (DDS) Test Methods
- 1.2.9 Automotive EEA Standards: Technical Requirements for Security of Automotive Ethernet Switch Equipment (Association Standard) (1)
- 1.2.9 Automotive EEA Standards: Technical Requirements for Security of Automotive Ethernet Switch Equipment (Association Standard) (2)
- 1.2.10 Automotive EEA Standards: Technical Requirements for Automotive Time Sensitive Network Middleware (Association Standard)
- 1.2.11 Automotive EEA Standards: SparkLink Release 1.0 (Association Standard) (1)
- 1.2.12 Automotive EEA Standards: SparkLink Release 1.0 (Association Standard) (2)
- 1.2.13 Association Standard: SparkLink Release 1.0 (3)
- 1.2.14 Association Standard: SparkLink Release 1.0 (4)
- 1.2.15 Automotive EEA Standards: "Software Defined Vehicle Service API Reference Specification 2.0" by SDV Working Group
- 1.2.16 Automotive EEA Standards: Release Schedule of "Software Defined Automotive Service API Reference Specification" by SDV Working Group
- 1.2.17 Automotive EEA Standards: Progress of SDV Working Group in Atomic Service API
- 1.3 Summary of EEA Updates of OEMS
- 1.3.1 Summary of EEA Upgrades of OEMs (1)
- 1.3.2 Summary of EEA Upgrades of OEMs (2)
- 1.3.3 Summary of EEA Upgrades of OEMs (3)
- 1.3.4 Summary of EEA Upgrades of OEMs (4)
- 1.3.5 Summary of EEA Upgrades of OEMs (5)
- 1.3.6 Summary of EEA Upgrades of OEMs (6)
- 1.3.7 Summary of EEA Upgrades of OEMs (7)
- 1.3.8 Summary of EEA Upgrades of OEMs (8)
2 E/E Architecture of Emerging Automakers
- 2.1 Tesla
- 2.1.1 E/E Architecture Evolution
- 2.1.2 The First-generation Domain Architecture: Model S EEA Topology
- 2.1.3 The First-generation Domain Architecture: Model X EEA Topology
- 2.1.4 The Second-generation Quasi-central Architecture: Model 3 EEA Topology
- 2.1.5 The Second-generation Quasi-central Architecture: Model 3 EEA Topology
- 2.1.6 The Second-generation Quasi-central Architecture: Model 3 EEA Topology
- 2.1.7 EEA Key Technologies (Autonomous Driving): Parameter Evolution of FSD HW1.0-HW4.0
- 2.1.8 EEA Key Technologies (Autonomous Driving): Main Chip Technology Upgrade of HW 4.0
- 2.1.9 EEA Key Technologies (Autonomous Driving): The Main Chip of HW 4.0 Has Tripled Computing Power, and GDDR6 Is Used for the First Time
- 2.1.10 EEA Key Technologies (Autonomous Driving): HW 4.0 Is Equipped with Phoenix 4D Radar
- 2.1.11 EEA Key Technologies (Autonomous Driving): The Main Camera (Front View) of HW 4.0 Has Evolved from Trinocular to Binocular Vision, with Three Additional Cameras
- 2.1.12 EEA Key Technologies (Autonomous Driving): Circuit Boards of HW3.0
- 2.1.13 EEA Key Technologies (Intelligent Cockpit): MCU4.0 (Infotainment Control Unit)
- 2.1.14 EEA Key Technologies (Intelligent Cockpit): MCU3.0 (Infotainment Control Unit)
- 2.1.15 EEA Key Technologies (Intelligent Cockpit): MCU3.0 (Infotainment Control Unit)
- 2.1.16 EEA Key Technologies (Intelligent Cockpit): MCU3.0 (Infotainment Control Unit)
- 2.1.17 EEA Key Technologies (Intelligent Cockpit): MCU2.0 (Infotainment Control Unit)
- 2.1.18 EEA Key Technologies (Power Architecture): 48V Low-voltage Electrical Architecture (1)
- 2.1.19 EEA Key Technologies (Power Architecture): 48V Low-voltage Electrical Architecture (2)
- 2.1.20 EEA Key Technologies (Power Architecture): 48V Low-voltage Electrical Architecture (3)
- 2.1.21 EEA Key Technologies (Power Architecture): Zonal Intelligent Power Distribution Design of Model 3 (1)
- 2.1.22 EEA Key Technologies (Power Architecture): Zonal Intelligent Power Distribution Design of Model 3 (2)
- 2.1.23 EEA Key Technologies (Power Architecture): Zonal Intelligent Power Distribution Design of Model 3 (3)
- 2.1.24 EEA Key Technologies (Zone Controller): Body Control Zone Controller Division of Model 3
- 2.1.25 EEA Key Technologies (Zone Controller): Body Zone Controller Distribution of Model 3
- 2.1.26 EEA Key Technologies (Zone Controller): Front Body Zone of Model 3 (1)
- 2.1.27 EEA Key Technologies (Zone Controller): Front Body Zone of Model 3 (2)
- 2.1.28 EEA Key Technologies (Zone Controller): Left and Right Body Zones of Model 3 (1)
- 2.1.29 EEA Key Technologies (Zone Controller): Left and Right Body Zones of Model 3 (2)
- 2.1.30 EEA Key Technologies (Zone Controller): Summary on Technical Features of Zone Controllers of Model 3
- 2.1.31 EEA Key Technologies (Zone Controller): The Third-generation Body Controller of Model Y
- 2.1.32 EEA Key Technologies (Zone Controller): The Fourth-generation Body Controller of Model Slaid
- 2.2 Xpeng
- 2.2.1 EEA Evolution: Technology Route
- 2.2.2 X-EEA 2.0: Domain Control Architecture for Xpeng P7
- 2.2.3 X-EEA 2.0: Software and Hardware Architecture for P7 Intelligent Driving
- 2.2.4 XPeng Auto Released the SEPA 2.0
- 2.2.5 X-EEA 3.0: Central Supercomputing (3 Computing Clusters) + Zonal Control (Z-DCU)
- 2.2.6 X-EEA 3.0: Central Supercomputing (3 Computing Clusters) + Zonal Control (Z-DCU)
- 2.2.7 X-EEA 3.0: Hardware, Communication and Power Architecture
- 2.2.8 X-EEA 3.0: Central Supercomputing (3 Computing Clusters) Hardware and Software Topology
- 2.2.9 X-EEA3.0 Key Technologies (Central Supercomputing): Central Supercomputing Platform C-DCU System Topology
- 2.2.10 X-EEA3.0 Key Technologies (Central Supercomputing): Central Supercomputing Platform C-DCU Domain Software Architecture
- 2.2.11 X-EEA3.0 Key Technologies (XPU): XPU Planning Roadmap
- 2.2.12 X-EEA 3.0 Key Technologies (XPU): XPU Software Architecture
- 2.2.13 X-EEA 3.0 Key Technologies (Communication Architecture): Ethernet+CAN-FD Cross-Domain Communication Architecture
- 2.2.14 X-EEA3.0 Key Technologies (Zone Controller): ZCU & VIU
- 2.2.15 X-EEA 3.0 Key Technologies (Software Architecture): SOA Software Architecture (1)
- 2.2.16 X-EEA 3.0 Key Technologies (Software Architecture): SOA Software Architecture (2)
- 2.2.17 X-EEA 3.0 Key Technologies (Software Architecture): SOA Software Architecture (3)
- 2.2.18 X-EEA3.0 Key Technologies (Autonomous Driving): Planning Roadmap
- 2.2.19 X-EEA3.0 Key Technologies (Autonomous Driving): XPILOT 4.0
- 2.2.20 X-EEA3.0 Key Technologies (Autonomous Driving): XPILOT 4.0 (Hardware Architecture)
- 2.2.21 X-EEA3.0 Key Technologies (Autonomous Driving): XPILOT 4.0 (New Generation Perception Architecture XNet)
- 2.2.22 X-EEA3.0 Key Technologies (Intelligent Cockpit): Xmart OS
- 2.3 NIO
- 2.3.1 EEA Evolution: Technology Route
- 2.3.2 NIO NT2 Key Technologies (Platform Architecture)
- 2.3.3 NIO NT2 Key Technologies (Autonomous Driving): 2nd GEN NIO AD
- 2.3.4 NIO NT2 Key Technologies (Autonomous Driving): ADAM + AQUILA (1)
- 2.3.5 NIO NT2 Key Technologies (Autonomous Driving): ADAM + AQUILA (2)
- 2.3.6 NIO NT2 Key Technologies (Intelligent Cockpit)
- 2.3.7 NIO NT2 Key Technologies (Intelligent Cockpit)
- 2.3.8 NIO NT2 Key Technologies (Chassis Domain): Intelligent Chassis Domain Controller ICC
- 2.3.9 NIO NT2 Key Technologies (Chassis Domain): Intelligent Chassis Domain Controller ICC
- 2.3.10 NIO NT2 Key Technologies (Chassis Domain): Intelligent Chassis Domain Controller ICC
- 2.3.11 NIO NT2 Key Technologies (Communication Architecture): Central Gateway LION Fused with Body Domain
- 2.3.12 Evolution to Next Generation Central Computing Architecture
- 2.3.13 Next EEA: Central Computing + Zonal Controller Architecture Topology
- 2.3.14 Next EEA: Features of Central Computing + Zonal Controller Architecture
- 2.3.15 AMP Multicore Framework of Central Computing + Zonal Controller (1)
- 2.3.16 AMP Multicore Framework of Central Computing + Zonal Controller (2)
- 2.3.17 Central Computing + Zonal Controller EEA: SOA Software
- 2.3.18 Central Computing + Zonal Controller Cross-domain Function Fusion and Isolation
- 2.4 Li Auto
- 2.4.1 EEA Evolution: LEEA1.0 - LEEA3.0
- 2.4.2 LEEA2.0 Key Technologies (Autonomous Driving): Platform Evolution Route
- 2.4.3 LEEA2.0 Key Technologies (Autonomous Driving): AD Max
- 2.4.4 LEEA2.0 Key Technologies (Autonomous Driving): AD Max3.0
- 2.4.5 LEEA2.0 Key Technologies (Autonomous Driving): Autonomous Driving Algorithms
- 2.4.6 LEEA2.0 Key Technologies (Intelligent Cockpit)
- 2.4.7 LEEA2.0 Key Technologies (Vehicle Control): Central Domain Controller (XCU)
- 2.4.8 Li Auto LEEA 3.0: Central Computing Platform + 4 Zone Controllers
- 2.4.9 Li Auto LEEA 3.0: Central Computing Unit (CCU) (1)
- 2.4.10 Li Auto LEEA 3.0: Central Computing Unit (CCU) (2)
- 2.4.11 Li Auto LEEA 3.0: Zone Controller
- 2.5 NETA Auto
- 2.5.1 Released the "Hozon Strategy 2025"
- 2.5.2 "Hozon Skateboard Platform"
- 2.5.3 "Hozon 2.0 Supercomputing System"
- 2.5.4 EEA Development Roadmap: Evolution of Multi-Domain Integrated Computing and Central Computing
- 2.5.5 EEA Key Technologies (Computing Platform): Full Stack Self-Research Hozon Central Computing Platform (1)
- 2.5.6 EEA Key Technologies (Computing Platform): Full Stack Self-Research Hozon Central Computing Platform (2)
- 2.5.7 EEA Key Technologies (Computing Platform): Full Stack Self-Research Hozon Central Computing Platform (3)
- 2.5.8 EEA Key Technologies (Autonomous Driving): Development Planning
- 2.5.9 EEA Key Technologies (Autonomous Driving): Development Planning
- 2.5.10 EEA Key Technologies (Autonomous Driving): NETA PILOT 3.0
- 2.5.11 EEA Key Technologies (Autonomous Driving): NETA PILOT 4.0
- 2.5.12 EEA Key Technologies (Powertrain Body Domain): Powertrain Domain Control System (PDCS) - Integrated Gateway Domain Control System (HPC)
- 2.6 Leap Motor
- 2.6.1 EEA Evolves Toward Central Computing Platform
- 2.6.2 Leap 2.0 EEA: Domain Control EEA
- 2.6.3 Leap 3.0 EEA: The "Four Leaf Clover" Central Integrated Architecture
- 2.6.4 Leap3.0 "Four Leaf Clover" Central Integrated EEA: System Topology
- 2.6.5 Leap3.0 "Four Leaf Clover" Central Integrated EEA: Computing Platform Configuration Strategy
- 2.6.6 Leap3.0 "Four Leaf Clover" Central Integrated EEA: Realize Self-development and Self-manufacturing Capability at 70% of Vehicle Costs
- 2.6.7 Leap3.0 "Four Leaf Clover" Central Integrated EEA: Central Supercomputing Platform Realizes "Four Domains in One"
- 2.6.8 Leap3.0 "Four Leaf Clover" Central Integrated EEA: Provide Four Models for Technology Output Cooperation
- 2.7 Voyah
- 2.7.1 Centralized EEA: ESSA+SOA
- 2.7.2 Centralized EEA: Central Controller OIB
- 2.7.3 Centralized EEA: Zone Controller VIU
- 2.7.4 Centralized EEA: Telematics Terminal T-box
- 2.7.5 Centralized EEA: System Topology
- 2.7.6 Centralized EEA: Physical Architecture
- 2.7.7 EEA Centralization: SOA Software Architecture (1)
- 2.7.8 EEA Centralization: SOA Software Architecture (2)
- 2.7.9 Centralized EEA: Network and Communication Architecture
- 2.7.10 Centralized EEA: Security Architecture
- 2.8 Human Horizons
- 2.8.1 Human Oriented Architecture (HOA)
- 2.8.2 HOA: System Topology
- 2.8.3 HOA EEA Key Technologies (Autonomous Driving): Autonomous Driving (HiPhi Z) (1)
- 2.8.4 HOA EEA Key Technologies (Autonomous Driving): Autonomous Driving (HiPhi Z) (2)
- 2.8.5 HOA EEA Key Technologies (Autonomous Driving): Autonomous Driving (HiPhi Z) (3)
- 2.8.6 HOA EEA Key Technologies (SOA): HiPhi Play
- 2.9 ZEEKR
- 2.9.1 EEA Evolution: EE 2.0 - EE 3.0
- 2.9.2 EE 2.0 Functional Domain Architecture
- 2.9.3 EE 3.0 Central Computing Architecture: 1 Central Computer + 2 Zone Controllers
- 2.9.4 EE 3.0 Central Computing Architecture: Central Supercomputing Platform
- 2.9.5 EEA Key Technologies (Autonomous Driving): ZAD Intelligent Driving Assistance System
- 2.9.6 EEA Key Technologies (Intelligent Cockpit): ZEEKR OS
- 2.9.7 EEA Key Technologies (Intelligent Cockpit): ZEEKR OS
- 2.9.8 EEA Key Technologies (Software Architecture): Industry Chain Ecosystem OTA Solution
- 2.9.9 EEA Key Technologies (Software Architecture): Self-developed OTA Solution
- 2.9.10 EEA Key Technologies (Software Architecture): Self-developed OTA Software Function Modules
- 2.9.11 EEA Key Technologies (Software Architecture): OTA Cloud-pipe-terminal Information Security Protection
- 2.10 IM Motors
- 2.10.1 IM EEA Layout: Software/Hardware/Communication Architecture
- 2.10.2 IM EEA Layout (Key Technology): Intelligent Cockpit
- 2.10.3 IM EEA Layout (Key Technology): Evolution of IM AD System
- 2.11 ARCFOX
- 2.11.1 EEA Evolution: Technology Route
- 2.11.2 ARCFOX BE21 EEA
- 2.11.3 ARCFOX IMC EEA
3 E/E Architecture of Independent Brands
- 3.1 Geely
- 3.1.1 EEA Evolution: Technology Route
- 3.1.2 GEEA 3.0 Central Computing Platform Architecture
- 3.1.3 GEEA3.0 EEA System Development: Architecture Features
- 3.1.4 GEEA3.0 EEA System Development: Central Computing Architecture
- 3.1.5 GEEA3.0 EEA System Development: SOA-based OS
- 3.1.6 GEEA3.0 EEA System Development: PMT-SOA Service Design Toolchain Transformation
- 3.1.7 GEEA3.0 EEA System Development: PMT-SOA Software Asset Transformation and Reuse Solution
- 3.1.8 GEEA3.0 EEA System Development: PMT-SOA Service Design Methodology
- 3.1.9 GEEA3.0 EEA System Development: PMT-SOA Service Design Specification
- 3.1.10 GEEA3.0 EEA System Development: GOS-Multiprotocol Multi-OS Compatible
- 3.1.11 GEEA3.0 EEA System Development: Developer Platform and Toolchain
- 3.1.12 GEEA3.0 EEA System Development: Agile Development with Continuous Iteration
- 3.1.13 EEA Key Technology (Intelligent Cockpit): Galaxy NOS
- 3.1.14 EEA Key Technology (Software): SOA Software Service Architecture
- 3.1.15 EEA Key Technology (Chip): Siengine Cockpit and Autonomous Driving SoC
- 3.1.16 EEA Key Technology (Computing power): Ecarx Central Computing Power Platform Super Brain
- 3.2 Great Wall Motor
- 3.2.1 EEA Evolution: Technology Route
- 3.2.2 GEEP 4.0 (Quasi) Central EEA: 3 Computing Platforms + 3 Zonal Controllers
- 3.2.3 GEEP 4.0 (Quasi) Central EEA: 3 Computing Platforms + 3 Zonal Controllers
- 3.2.4 GEEP 4.0 (Quasi) Central EEA: CCU
- 3.2.5 GEEP 4.0 (Quasi) Central EEA: VIU
- 3.2.6 GEEP 4.0 (Quasi) Central EEA: SOA Software Framework (1)
- 3.2.7 GEEP 4.0 (Quasi) Central EEA: SOA Software Framework (2)
- 3.2.8 GEEP 4.0 (Quasi) Central EEA: Full-stack Security
- 3.2.9 GEEP 4.0 (Quasi) Central EEA: Architecture Feature
- 3.2.10 GEEP 4.0 (Quasi) Central EEA: Summary of Mass Production Solutions
- 3.2.11 Key Technology of GEEP 4.0 (Computing Platform): "Little Magic Box 3.0" (IDC 3.0)
- 3.2.12 Key Technology of GEEP 4.0 (Autonomous Driving): Coffee Intelligence
- 3.2.13 Key Technology of GEEP 4.0 (Autonomous Driving): Coffee Intelligence 2.0
- 3.2.14 Key Technology of GEEP 4.0 (Intelligent Cockpit): Coffee OS 2
- 3.2.15 GEEP 5.0 Central Computing EEA: Central Brain + Zonal Controller
- 3.3 GAC
- 3.3.1 EEA Evolution: Technology Route
- 3.3.2 GA3.0 X-Soul EEA: First Available in Aion Hyper GT
- 3.3.3 GA3.0 X-Soul EEA: 3 Computing Units + 4 Zonal Controllers
- 3.3.4 GA3.0 X-Soul EEA: Features
- 3.3.5 GA3.0 X-Soul EEA: Hardware Platform (1)
- 3.3.6 GA3.0 X-Soul EEA: Hardware Platform (2)
- 3.3.7 Key Technology of GA3.0 X-Soul EEA (Body Domain): Body Zone Controller
- 3.3.8 Key Technology of GA3.0 X-Soul EEA (Body Domain): NXP S32G G3
- 3.3.9 GA3.0 X-Soul EEA (Software): SOA Software Platform
- 3.3.10 GA3.0 X-Soul EEA (Software): User Co-Creation Platform
- 3.3.11 GA3.0 X-Soul EEA (Software): GAC Psi OS System Framework
- 3.3.12 Key Technology of GA3.0 X-Soul EEA (Autonomous Driving): Multi-fusion Intelligent Driving Perception System
- 3.3.13 Key Technology of GA3.0 X-Soul EEA (Autonomous Driving): Second-generation Intelligent Zoomable LiDAR
- 3.3.14 Key Technology of GA3.0 X-Soul EEA (Autonomous Driving): ADiGO PILOT Data Closed-loop Platform
- 3.3.15 Key Technology of GA3.0 X-Soul EEA (Autonomous Driving): Infrared Remote Sensing Technology
- 3.3.16 Key Technology of GA3.0 X-Soul EEA (Intelligent Cockpit): ADiGO SPACE
- 3.3.17 3.3.16 Key Technology of GA3.0 X-Soul EEA (Intelligent Cockpit): ADiGO SPACE: ADiGO 5.0
- 3.4 BYD
- 3.4.1 EEA Evolution: Technology Route
- 3.4.2 e-Platform 3.0 EEA: System Design
- 3.4.3 e-Platform 3.0 EEA: Multi-domain Computing Ideas
- 3.4.4 e-Platform 3.0 EEA: Integrated Left/Right Body Controller
- 3.4.5 e-Platform 3.0 EEA: Intelligent Power Domain (1)
- 3.4.6 e-Platform 3.0 EEA: Intelligent Power Domain (2)
- 3.4.7 Next-generation EEA: "Yisifang" Technology Platform
- 3.4.8 Next-generation EEA: "Yisifang" Multi-domain Computing + Zonal Controller Architecture
- 3.4.9 Key Technology of Next-generation EEA (Computing Platform): "Eye of God" Advanced Intelligent Assisted Driving System
- 3.4.10 Key Technology of Next-generation EEA (Computing Platform): Self-developed High-computing-power Platform
- 3.4.11 Key Technology of Next-generation EEA (Body Domain): YunNian New Energy Exclusive Intelligent Body Control System
- 3.5 SAIC
- 3.5.1 EEA Evolution: Galaxy Full-stack 1.0, Galaxy Full-stack 3.0
- 3.5.2 Z-One Full-stack 3.0 (Quasi) Central EEA: 2 Central Computing Units + 4 Zonal Controllers
- 3.5.3 Z-One Full-stack 3.0 (Quasi) Central EEA: Supercomputing Brain Series Product Lines
- 3.5.4 Z-One Full-stack 3.0 (Quasi) Central EEA: First Cross-Domain Integration Central Brain ZXD1 in Mass Production
- 3.5.5 Z-One Full-stack 3.0 (Quasi) Central EEA: Cockpit-Driving Integration HPC
- 3.5.6 Z-One Full-stack 3.0 (Quasi) Central EEA: Cockpit-Driving Integration Software Architecture
- 3.5.7 Z-One Full-stack 3.0 (Quasi) Central EEA: SOA Platform (1)
- 3.5.8 Z-One Full-stack 3.0 (Quasi) Central EEA: SOA Platform (2)
- 3.5.9 Z-One Full-stack 3.0 (Quasi) Central EEA: SOA Platform (3)
- 3.5.10 Z-One Full-stack 3.0 (Quasi) Central EEA: Cooperation Ecosystem
- 3.5.11 MG EEA: Second Generation SIGMA Architecture
- 3.5.12 MG EEA: SIGMA Architecture Characteristics
- 3.5.13 MG EEA: SIGMA EEA
- 3.6 Changan
- 3.6.1 EEA Evolution: Technology Route
- 3.6.2 EPA 1 EEA: Three Domain Control Architectures & Support for SOA Service Extension
- 3.6.3 EPA 1 EEA: Smart Vehicle Control Unit (SVCU)
- 3.6.4 "Central + Looped Network " EEA: Debut of the CD701 Prototype
- 3.6.5 "Central + Looped Network " EEA: Feature
- 3.6.6 "Central + Looped Network " EEA: Six-layer Architecture Design with Layered Decoupling
- 3.6.7 "Central + Looped Network " EEA: Topology Architecture
- 3.6.8 "Central + Looped Network " EEA: Thinking of Architecture Scalability
- 3.6.9 "Central + Looped Network " EEA: Service-oriented Solution
- 3.6.10 "Central + Looped Network " EEA: Service-oriented Communications
- 3.6.11 "Central + Looped Network " EEA: Backbone Network Communication
- 3.6.12 "Central + Looped Network " EEA: Near Field Communication
- 3.6.13 "Central + Looped Network " EEA: Hardware I/O Standardization
- 3.6.14 "Central + Looped Network " EEA: Information Security
- 3.6.15 "Central + Looped Network" EEA: RTDriveOS Real-Time Operating System
- 3.6.16 "Central + Looped Network" EEA: Zhuge Intelligence
- 3.7 FAW Hongqi
- 3.7.1 EEA Evolution: FEEA2.0 & FEEA3.0
- 3.7.2 FEEA2.0 EEA: Features
- 3.7.3 FEEA2.0 EEA: Intelligent Cockpit Platform
- 3.7.4 FEEA2.0 EEA: Hongqi HC3.0 Intelligent Cockpit
- 3.7.5 FEEA2.0 EEA: Body Domain Control Module (BDCM)
- 3.7.6 FEEA3.0 EEA: Three Platforms of SmartControl, SmartEnjoy and SmartDrive
- 3.7.7 FEEA3.0 EEA: TSN Ethernet Multi-Domain Controller
- 3.7.8 FEEA3.0 EEA: "Qizhi" Super Architecture FMEs
- 3.7.9 FEEA3.0 EEA: Chip and Perception Configuration
- 3.8 Chery
- 3.8.1 EEA Evolution: Technology Roadmap
- 3.8.2 EEA: Lion Intelligence
4 E/E Architecture of Foreign Brands
- 4.1 Volkswagen
- 4.1.1 EEA Evolution: MQB-MEB-SSP
- 4.1.2 EEA Evolution: E(3) 1.1/1.2/2.0
- 4.1.3 MQB Platform EEA: Communication Topology (1)
- 4.1.4 MQB Platform EEA: Communication Topology (2)
- 4.1.5 MQB Platform EEA: System Architecture
- 4.1.6 MEB Platform EEA: Introduction
- 4.1.7 MEB Platform EEA: Detailed Architecture Topology of ID.4
- 4.1.8 MEB Platform EEA: Communication Network Connection of ID.4
- 4.1.9 MEB Platform EEA: Network Architecture Topology of ID.4
- 4.1.10 MEB Platform EEA: Network Architecture Index Definition and Bus Layout of ID.4
- 4.1.11 MEB Platform EEA: ICAS Architecture of ID.4
- 4.1.12 MEB Platform EEA: ICAS Computing Architecture of ID.4
- 4.1.13 MEB Platform EEA: ICAS Internal Communications Architecture of ID.4
- 4.1.14 MEB Platform EEA: Functional Partition
- 4.1.15 MEB Platform EEA: ICAS1 and ICAS3 Functional Partition of ID.4
- 4.1.16 MEB Platform EEA: ICAS1 Vehicle Control Domain Functional Partition
- 4.1.17 Multi-domain Computing Layout: ICAS1 Vehicle Control Domain
- 4.1.18 MEB Platform EEA: ICAS3 Functional Partition of ID.4
- 4.1.19 MEB Platform EEA: ICAS3 Master Control Chip of ID.4
- 4.1.20 MEB Platform EEA: ICAS3 Cockpit Domain Controller Function System
- 4.1.21 MEB Platform EEA: ICAS3 Cockpit Domain Controller System Architecture
- 4.1.22 MEB Platform EEA: ICAS3 Cockpit Domain Controller Feature
- 4.1.23 MEB Platform EEA: ICAS3 Cockpit Domain Controller Scalability and Integration
- 4.1.24 MEB Platform EEA: ICAS2 Assisted Driving Domain of ID.4
- 4.1.25 MEB Platform EEA: Smart Antenna System of ID.4
- 4.1.26 MEB Platform EEA: OCU Connection of ID.4
- 4.1.27 MEB Platform EEA: High-voltage System Network Topology of ID.4
- 4.1.28 MEB Platform EEA: Brake System Network Topology of ID.4
- 4.1.29 MEB Platform EEA: SOA Software Architecture (1)
- 4.1.30 MEB Platform EEA: SOA Software Architecture (2)
- 4.1.31 MEB Platform EEA: SOA Software Architecture (3)
- 4.1.32 MEB Platform EEA: Cloud Service Architecture
- 4.1.33 MEB Platform EEA: Cybersecurity Architecture
- 4.1.34 E3 2.0 EEA: Development Process
- 4.1.35 E3 2.0 EEA: CARIAD Software Platform (1)
- 4.1.36 E3 2.0 EEA: CARIAD Software Platform (2)
- 4.1.37 E³ 2.0 Architecture: VW.OS
- 4.1.38 SSP Architecture: Both PPE and MEB will be Integrated into Future SSP Architecture
- 4.1.39 SSP Architecture: EEA Design
- 4.1.40 SSP Architecture: Model Planning
- 4.1.41 SSP Architecture: Central Computing Cluster
- 4.2 BMW
- 4.2.1 EEA Evolution
- 4.2.2 Mass-produced EEA: Architecture Topology
- 4.2.3 Mass-produced EEA: Specific Meaning of Each Node in the Architecture Topology
- 4.2.4 Mass-produced EEA: Ethernet Communication Node
- 4.2.5 Mass-produced EEA: HU-H Cockpit System Architecture
- 4.2.6 Mass-produced EEA: HU-H Connected System Architecture
- 4.2.7 Mass-produced EEA: ADAS System Hardware Configuration
- 4.2.8 Mass-produced EEA: ADAS System Architecture and Meaning of Each Node
- 4.2.9 Mass production EEA: Software System Evolution
- 4.2.10 Next Generation Zonal EEA
- 4.2.11 Zonal EEA: Architecture Design Ideas
- 4.2.12 Zonal EEA: Quasi-central Computing (2 Computing Clusters) + Zonal Controller
- 4.2.13 Next-generation Zonal EEA: Architecture Topology
- 4.2.14 Next-generation Zonal EEA: Hardware Architecture Adopts 2 Computing Clusters
- 4.2.15 Next-generation Zonal EEA: Dynamic Resource Scheduling DRS
- 4.2.16 Next-generation Zonal EEA: Communication Architecture and SOA Solutions
- 4.2.17 Next-generation Zonal EEA: Automotive Communication Network
- 4.2.18 Next-generation Zonal EEA: Autonomous Driving Hardware (Aptiv+EyeQ5)
- 4.2.19 Next-generation Zonal EEA: Autonomous Driving Hardware (Valeo + Qualcomm)
- 4.2.20 Next-generation Zonal EEA: Intelligent Cockpit Planning
- 4.2.21 Next-generation Zonal EEA: Neue Klasse Architecture Planning
- 4.3 Mercedes-Benz
- 4.3.1 EEA Evolution: Technical Route
- 4.3.2 Mass-produced EEA: STAR3 Network Architecture Overview
- 4.3.3 Mass-produced EEA: STAR3 Network Topology Connection
- 4.3.4 Mass-produced EEA: STAR3 High-speed Communication Bandwidth (1)
- 4.3.5 Mass-produced EEA: STAR3 High-speed Communication Bandwidth (2)
- 4.3.6 Mass-produced EEA: STAR3 High-speed Communication Bandwidth (3)
- 4.3.7 Mass-produced EEA: STAR3 Automotive Ethernet Network Topology
- 4.3.8 Mass-produced EEA: STAR3 Service-oriented Communication (1)
- 4.3.9 Mass-produced EEA: STAR3 Service-oriented Communication (2)
- 4.3.10 Mass-produced EEA: STAR3 Service-oriented Communication (3)
- 4.3.11 Mass-produced EEA: STAR3 Network and Information Security
- 4.3.12 Mass-produced EEA: STAR3 12V Power Supply Architecture
- 4.3.13 Mass-produced EEA: STAR3 Architecture Topology
- 4.3.14 Mass-produced EEA: STAR3 Architecture Topology Function Definition (1)
- 4.3.15 Mass-produced EEA: STAR3 Architecture Topology Function Definition (2)
- 4.3.16 Mass-produced EEA: STAR3 Architecture Topology Function Definition (3)
- 4.3.17 EEA Key Technologies (Software Platform): MB.OS (1)
- 4.3.18 EEA Key Technologies (Software Platform): MB.OS (2)
- 4.3.19 EEA Key Technologies (Software Platform): MB.OS (3)
- 4.3.20 EEA Key Technologies (Software Platform): MB.OS (4)
- 4.3.21 EEA Key Technologies (Autonomous Driving): Partners
- 4.3.22 EEA Key Technologies (Intelligent Cockpit): 3rd Generation MBUX Intelligent Human-Machine Interaction System
- 4.4 Toyota
- 4.4.1 EEA Evolution: Technology Route Zonal Architecture: Central Brain + Cross-domain Controller
- 4.4.2 Zonal Architecture: Evolution Path of Software Platform (BSW)
- 4.4.3 Zonal Architecture: EEA Evolution and AUTOSAR BSW Migration
- 4.4.4 Zonal Architecture: Central & Zone Concept (1)
- 4.4.5 Zonal Architecture: Central & Zone Concept (2)
- 4.4.6 Zonal Architecture: Software Development Strategy
- 4.4.7 Zonal Architecture: Adaptive Software Platform
- 4.4.8 Zonal Architecture: Computer Aided Software Engineering (CASE) System Development
- 4.4.9 Zonal Architecture: Cybersecurity and Encryption Algorithm
- 4.4.10 EEA Key Technology (Autonomous Driving): TRI-AD
- 4.4.11 EEA Key Technology (Autonomous Driving): Evolution of Autonomous Driving Solutions
- 4.4.12 EEA Key Technology (Intelligent Cockpit): T-SMART Cockpit
- 4.4.13 EEA Key Technology (Software): Arene OS (1)
- 4.4.14 EEA Key Technology (Software): Arene OS (2)
- 4.5 General Motors
- 4.5.1 EEA Evolution: Technology Route
- 4.5.2 Global A and Global B
- 4.5.3 EEA Evolution: Global A and Global B
- 4.5.4 EEA Evolution: Technical Features of VIP Intelligent Electronic Architecture
- 4.5.5 EEA Evolution: Technical Features (1)
- 4.5.6 EEA Evolution: Technical Features (2)
- 4.6 Ford
- 4.6.1 EEA Evolution: Technology Route
- 4.6.2 FNV EEA
- 4.6.3 FNV EEA: Intelligent Driving
- 4.6.4 FNV EEA: Intelligent Driving
- 4.6.5 FNV EEA: OTA Update
- 4.6.6 FNV EEA: Blue Oval Intelligence
- 4.6.7 FNV EEA: Communication Architecture
- 4.7 Volvo
- 4.7.1 EEA Evolution: Technology Route
- 4.7.2 SPA1 EEA: Domain Centralized
- 4.7.3 SPA2 EEA: Firstly Installed in Volvo EX90
- 4.7.4 SPA2 EEA: VCU+VIU
- 4.7.5 SPA2 EEA: Three Computing Clusters VCU + Zonal Controller VIU
- 4.7.6 SPA2 EEA: System Architecture
- 4.7.7 SPA2 EEA: System Architecture
- 4.7.8 SPA2 EEA: System Development Steps (Phase 1)
- 4.7.9 SPA2 EEA: System Development Steps (Phase 2)
- 4.7.10 SPA2 EEA: Vehicle Computation Unit
- 4.7.11 SPA2 EEA: Software Development for Central Computing Platform (1)
- 4.7.12 SPA2 EEA: Software Development for Central Computing Platform (2)
- 4.7.13 SPA2 EEA: Software Development for Central Computing Platform (3)
- 4.7.14 SPA2 EEA: Software Development for Central Computing Platform (4)
- 4.7.15 SPA2 EEA: Software Development for Central Computing Platform (5)
- 4.7.16 SPA2 EEA: Core Development Team in China
- 4.7.17 SPA2 EEA: Planned for release in 2022
- 4.7.18 SPA2 Zonal EEA System Design: Zonal Controller (VIU) Function Assignment
- 4.7.19 SPA2 Zonal EEA System Design: SOA Software Design Framework
- 4.7.20 SPA2 EEA Key Technology (Software): Software Layering Architecture
- 4.7.21 SPA2 Zonal EEA System Design: SOA Software
- 4.7.22 SPA2 Zonal EEA System Design: VolvoCars.OS
- 4.8 Renault-Nissan-Mitsubishi Alliance (RNM)
- 4.8.1 RNM EEA Evolution: Technology Planning
- 4.8.2 RNM EEA Evolution: HPC + Zonal + Sensor
- 4.8.3 RNM EEA Evolution: FACE Architecture
- 4.8.4 RNM EEA Evolution: FACE Architecture CAN Data Snapshot
- 4.8.5 RNM EEA Evolution: SOA
- 4.8.6 Nissan Intelligent Driving Solution Development Route
- 4.8.7 RNM Alliance Cloud
- 4.8.8 Self-developed ADAS Algorithms
- 4.9 Stellantis
- 4.9.1 STLA Brain Quasi-central EEA: HPC and Zonal Controller
- 4.9.2 STLA Brain Quasi-central EEA: Three Technology Platforms (1)
- 4.9.3 STLA Brain Quasi-central EEA: Three Technology Platforms (2)
- 4.9.4 STLA Brain Quasi-central EEA: Software Business Strategy (1)
- 4.9.5 STLA Brain Quasi-central EEA: Software Business Strategy (2)
- 4.9.6 STLA Brain Quasi-central EEA: Software Business Strategy (3)
- 4.9.7 STLA Brain Quasi-central EEA: Software System Architecture
- 4.9.8 STLA Brain Quasi-central EEA: STLA Smart Cockpit
- 4.9.9 Stellantis STLA Brain Quasi-central EEA: STLA Auto Drive
5 Supply Chain Deployments under Automotive E/E Architecture Updates
- 5.1 Cross-domain/Central Computing Platform: Supply Chain Deployment
- 5.1.1 Mainstream Central Computing Platform Solutions of Tier 1 Suppliers
- 5.1.2 ECARX Super Brain (Central Computing Platform)
- 5.1.3 Desay SV's Cross-domain Fusion Computing Platform - "Aurora" (1)
- 5.1.4 Desay SV's Cross-domain Fusion Computing Platform - "Aurora" (2)
- 5.1.5 Desay SV's Cross-domain Fusion Computing Platform - "Aurora" (3)
- 5.1.6 Desay SV's Cross-domain Fusion Computing Platform - "Aurora" (4)
- 5.1.7 Jingwei Hirain's Central Computing Platform (CCP)
- 5.1.8 Neusoft Reach and UAES' Next-generation Cross-domain Central Computing Unit
- 5.1.9 PATEO Vehicle Central Computering Module (CCM)
- 5.1.10 UAES Vehicle Computing Platform - VCP 1.0
- 5.1.11 EnjoyMove Technology's High-Performance Computing Cluster - X-Computing Grouplet (XCG)
- 5.1.12 EnjoyMove Technology's High-Performance Computing Cluster - X-Computing Grouplet (XCG)
- 5.1.13 ZF's 4th-generation Supercomputer - ProAI
- 5.1.14 Continental's 4-in-1 High Performance Computer (HPC)
- 5.1.15 LG Electronics Cooperated with Qualcomm and Magna to Develop the Next Generation Central Computer
- 5.1.16 Lenovo Group Developed A Vehicle Central Computing Platform Based on NVIDIA Thor
- 5.2 Cross-domain/Central Computing SOC: Supply Chain Deployment
- 5.2.1 Central Computing SOC: Cross-domain Fusion SoC Products
- 5.2.2 Central Computing SOC: Nvidia Thor Centralized Car Computer
- 5.2.3 Central Computing SOC: Qualcomm Snapdragon Ride Flex
- 5.2.4 Central Computing SOC: Qualcomm Snapdragon Ride Flex
- 5.2.5 Central Computing SOC: SemiDrive's Future-oriented Central Computing Architecture
- 5.2.6 Central Computing SOC: Black Sesame "Wudang" Series C1200
- 5.2.7 Central Computing SOC: Black Sesame "Wudang" Series C1200
- 5.2.8 Central Computing SOC: Black Sesame "Wudang" Series C1200
- 5.3 MCU: Supply Chain Deployment
- 5.3.1 Central Computing + Zone Controller: Requirements for MCU
- 5.3.2 Central computing + Zone Controller MCU: Infineon TC4xx (1)
- 5.3.3 Central computing + Zone Controller MCU: Infineon TC4xx (2)
- 5.3.4 Central computing + Zone Controller MCU: Infineon TC4xx (3)
- 5.3.5 Central computing + Zone Controller MCU: Infineon TC4xx (4)
- 5.3.6 Central Computing + Zone Controller MCU: SemiDrive E3
- 5.3.7 Central Computing + Zone Controller MCU: Renesas RH850
- 5.3.8 Central Computing + Zone Controller MCU: NXP S32Z/E
- 5.4 Automotive Bus Network: Supply Chain Deployment
- 5.4.1 Architecture Diagram of Mainstream Automotive Network System
- 5.4.2 Trend of Automotive Bus Network: Gigabit Automotive Ethernet, MIPI A-PHY and Automotive SerDes Alliance
- 5.4.3 Key Technology for Building the Next-generation E/E Architecture - High-Bandwidth/Rate Communication Design Technology
- 5.4.4 Evolution of Vehicle Backbone Network to Ethernet
- 5.4.5 OEMs Have Strong Demand for 10G+ Bandwidth, and Chip Vendors Are also Accelerating the Deployment of 10G+
- 5.4.6 There Will Be more than 100 Ethernet Ports in a Single Vehicle in the Future (1)
- 5.4.7 There Will Be more than 100 Ethernet Ports in a Single Vehicle in the Future (2)
- 5.4.8 Automotive Ethernet Switch: 3rd-generation Marvell Brightlane Ethernet Switch - 88Q51xx
- 5.4.9 Automotive Ethernet Switch: Broadcom Delivers World's First 50G Automotive Ethernet Switch - BCM8958X
- 5.4.10 In the Next-generation E/E Architecture, Automotive Ethernet PHY Chips Are in Urgent Demand
- 5.4.11 Automotive Ethernet PHY Chip: Broadcom Multigigabit Automotive Ethernet PHY - BCM8989X
- 5.4.12 Automotive Ethernet PHY Chip: NXP TJA1101/1102
- 5.4.13 Automotive Ethernet PHY Chip: Infineon TC4xx Integrates Ethernet Bridge
- 5.4.14 Automotive Ethernet PHY Chip: Microchip Introduces Its First Automotive-Qualified 10BASE-T1S Ethernet Devices - LAN867x
- 5.4.15 Automotive Ethernet PHY Chip: TI Gigabit Automotive Ethernet PHYDP83TG720S-Q1
- 5.4.16 Automotive

